
微机动态轨道衡称重软件设计
一、概述
微机动态轨道衡是能够对在低速行驶中的火 车车辆的重量进行称量的自动化计量设备。它采用 微型计算机技术,具有自动称量、自动判断车辆方 向、自动判断机车、守车、非标准车辆和有效车辆, 并只对有效车辆进行计量,并具有打印、存储、报表 生成等功能。这些先进的智能化的计量技术都是由 称重软件完成的。微机动态轨道衡的两项重要指标 ——计量准确度及运行可靠性也都与称重程序的 设计有关。因此,一台功能先进、称量准确、运行稳 定可靠的微机动态轨道衡其称重程序的设计与编 制是至关重要的。
二、微机动态轨道衡称重软件简介
微机动态轨道衡的最大特点之一就是动态称 量,它完全不同于静态称量,其称重程序的编制比 较复杂。微机动态轨道衡按称重方式目前分为轴计 量、转向架计量、整车计量,常用的为转向架计量, 即车辆的两个转向架分别称量,二次称量相加得到 整车重量。对于转向架计量的动态轨道衡其称重程 序一般应完成下列功能:在无车列上衡之前程序处 于检测等待状态,当车列驶入台面后能够作出准确 判断,车列上台面后,要判断出哪个是机车,如果有 守车还要判断出哪个是守车,车列中有无非标准车 辆,对上述车列不进行有效计量。对标准车列要进 行前后两个转向架的判别,即首先判别哪个是前转 向架,当前转向架驶入有效台面后对其进行称量, 然后判别后转向架,并对其进行称量,两个转向架 的称量值(即采集到的A/D转换值)进行相加,经 过工程量转换后得到其重量值。对有效车列称量值 进行数字滤波、误差分析、线性补偿等也是称重程 序非常重要的任务。
三、微机动态轨道衡称重程序的编制
1、车列上台面的判别
称重程序在车列未驶入台面进行称量之前处 于检测等待状态,当车列驶入台面时,称重传感器 将输出一阶跃脉冲信号,计算机采集到这一脉冲信 号后,将退出检测等待状态进人下一步处理程序。 因此在车列上台面判别程序中。需设置一“门槛”数 据,当程序采集到的称重数据小于这一 “门槛”数据 时,说明称重尚未开始,程序继续循环等待。当程序 采集到的数据大于设置的“门檻”数据时,说明车列 已驶人称重台面,称重程序经进一步确认后,进入 下一步处理程序。“门槛”数据的大小需根据微机动 态轨道衡系统实际情况确定,“门槛”数据不能选取 的太小,如果太小,台面有轻微的重量干扰,称重程 序认为称重开始,从而造成误判,如果太大,将会导 致车列驶人台面后不能及时作出判断,从而影响称 重程序的进一步处理。
2.前后转向架及有效称量段的判别
对于转向架称量的微机动态轨道衡,首先要正 确判断出一节车列的前后转向架,对于标准车列通 过称重台面时产生的信号用理想化的曲线表示如 图1。其中k段为空台面,lql为前转向架的前轮对 在台面上的输出信号,lq2为整个前转向架的输出 信号,lhl为后转向架的前轮对在台面上的输出信 号,lh2为整个后转向架的输出信号,2ql为下一节 车列前转向架的输出信号。称重程序判别前后转向 架的程序为:在空台面状态下设置一 “门槛”数据。
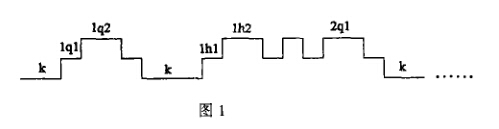
当程序采集到的数据超出“门植”数据,即认为车列 前转向架的前轮对已上台面,即lql段,以lql段为 基准设置一 “门槛”数据,当采集到的数据超出“门 檻”数据,说明整个前转向架已上台面,即lq2段,并 且lq2为前转向架的有效称量段(对有效称量段的 数据处理及计算将在后面介绍)。后转向架及下一 节车列的判别依次类推。
3、数据处理及计算
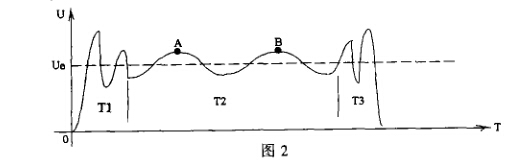
正确判别出一节车列的前后转向架,是微机动 态轨道衡可靠稳定运行的首要条件,而对采集到的 有效称量段的数据必须进行处理,才能保证动态轨 道衡达到要求的精度。众所周知,动态轨道衡称量 过程是在不间断的动态中称量的,表现在采集到的 数据没有一定的稳定值,都是在不断变化的。称重 程序数据处理就是从这些变化的数据中找出规律, 利用微机具有数据分析、数据处理的能力,从这些 离散的、变化的数据中,得出正确的称量值,从而提 高动态轨道衡的准确度。理论和实践证明,一个转 向架在有效称量段上采集的数字,一般要经历上台 面时的冲击干扰,稳态阶段的车辆振动干扰及台面 自振干扰,下台面过程中的过渡干扰三个阶段,其 波形如图2(仅供参考用):其中T1阶段为车列上台 面时的冲击干扰,其特点是幅度大,衰减快,一般持 续时间为100ms -200ms。T2阶段为稳态阶段,干扰 主要来自车列的振动,其特点为波形近似正弦波曲 线,周期与车列的运行速度有关,在规定的速度范 围内至少有一个完整的周期波形。T3为车列下台面 时的过渡干扰,其特点是幅度较大,时间短。从上述 分析可知,在整个有效称量段内,应去掉Tl、T3两 个阶段,以T2段的数据为有效数据。对有效段数据 的处理有多种方法,常用的有平均值法,即把T2段 的所有采集数据求平均值作为计量值,即u = (U1 +U2 + U3 + +Un)/N。去除粗大误差法,即把T2段的数据按从小到大排序(也可从大到小), 根据拉-达准则,当I Ui丨> 38时所测数据为异常数 据,故判为粗大误差,将含有粗大误差的数据剔除, 取剩余数据为有效值。假定干扰信号为正弦波Un- sin^t,干扰丨号的平均值为Un,可以得出相对误差
公式为,由公式可知,当在T2期 n Nn
间采样得到干扰周期为整数个时,相对误差最小。 基于上述分析,称重程序误差处理的具体编制过程 为:在程序中设置一数组存储区,把一个转向架在 台面上的全部数据以一维数组形式存入存储区,从 第一个数据开始,向后跳过N个数据,因为每一个 数据的采集时间T(ms)都是一定的,所以就相当于 延时了 N*T(mS)的时间,即避开冲击干扰,N*T- 般取100ms - 200ms之间,从N + 1个数据开始,1一 直找到波形的顶点A,然后从数组的最后一个数据 向前跳过M个数据,即延时MKms),避开下台面 的过渡期干扰,M'T—般取50ms-100ms之间,从 M + 1个数据开始,一直找到波形的顶点B,对A、B 数据段的数据进行去除粗大误差、求平均值处理, 从而得到一个转向架的计量值。通过微机动态轨道 衡反复试验和实际运行证明,采集数据经过上述处 理,微机动态轨道衡的准确度是非常高的。
4、工程量转换及线性补偿等
所谓工程量转换就是把已处理的有效采集数 据乘以一定的系数,得到实际重量值。线性补偿在 动态轨道衡系统中也是必不可少的,线性补偿分整 段补偿和分段补偿,整段补偿在整个称量段中进行 一次性补偿,而分段补偿是根据具体的需要对整个 称量段进行分段,对每一段的非线性进行补偿,从 而使轨道衡达到更高的精度。
四、结束语
称重程序是微机动态轨道衡的关键技术之一, 了解轨道衡的动态称重过程,掌握称重软件的设计 方法,对于提高微机动态轨道衡的计量精度,保证 其稳定可靠运行,都具有非常重要的实际意义。微 机动态轨道衡形式多样,称重程序的编制也有多种 方法和形式,本文介绍的微机动态轨道衡称重程序 的编制方法,在实际运行中已取得了良好的效果。
