
地磅称重传感器技术参数解读
本文着重讲解如何根据相对DR或Z和V.或Y两个参数来设计称重器, 并列举了两个实例,单只传感器和四只传感器的应用。并论证了用C3级传感器可以设计 n=4000分度的衡器。DR或Z和或Y这两个参数是设计衡器的主要依据。
称重传感器的品质决定了衡器的精度和可靠 性。所以说称重传感器是称重系统的心脏。衡器 特别是贸易用的衡器,都是属于国家强制检定的 计量器具,所以无论是使用何种原理的称重传感 器所制造的衡器,都必须满足国家标准或国际标 准。但至今除应变式称重传感器有依照非自动衡 器规则来制定的标准和检定规程,还没有其它类 型的称重传感器有与之相类似的标准和检定规程。 幸运的是,现在使用的衡器百分之九十左右都是 使用应变式传感器庆平除外。这对我们使用应 变传感器来设计和制造衡器带来了很大的方便。 本文主要讨论应变式传感器技术参数的有关问题。
为了便于了解应变式传感器与电子衡器间的 关系,即R60和R76间的关系,先简单介绍一下 有关历史。
1938年Simmons和Ruge发明了应变计,用来 测量应变,主要用于军工和工程方面。到1966年 PTB发表了将应变传感器用于机电结合称重装置 的文章,此时传感器的精度已达到0.1%,并通过 了产品认证。1976年PTB发表了应变式传感器首 次试验检定的文章,该检定是根据称重机IR3 OIML规则和71/316/EEC欧洲指令。然而此时是根 据应变式力传感器的技术指标来试验。它与衡器 的计量要求和技术指标之间存在差异和不同要求。 特别是之后电子衡器的迅速发展、应变式力传感 器单项的技术指标与非自动衡器用分段阶梯的最 大允许误差限间存在根本性的差异。迫切需要制 定能与非自动衡器计量要求和技术要求相适应的 称重传感器的标准和计量检定规程。从上世纪八 十年代初,OIML组织就着手编制适于非自动衡器 的称重传感器国际建议和适用电子衡器的非自动 衡器国际建议,即R60和R76号国际建议。1992 年版的R76号建议(包括1994的修订本的基本 规则是最接近非自动衡器计量称重要求的版本。 R60在1991年、1993年发布了包括有计算程序和 试验报告的建议。该建议是根据R76号建议的计 量要求和技术要求专门制定的适用于衡器要求的 传感器的国际建议。并在1995年巴黎召开的 “Weighing Towards the Year 2000” 的会上进行了首 次修改,并由PTB的B.MEIBNER以题为'"Reflections on NAMIs Module ‘ Load Cell 的文章 对R60的内容做了讲释,这篇文章对我们了解 R60以及与R76间的关系很有帮助。之后的修定 版本,在基本原则上没有改变。
R60的计量要求是根据R76制定与R76 —样 也是分为四个精度级别,A、B、C或D与非自动 衡器的四个级别I、II、III或IV相对应。对传感 器最大允许误差的分量系数PiC=0.7他可选定在 0.3〜0.8范围内,三级和四级秤和与之对应的C 级和D级传感器的误差限如表1所示。
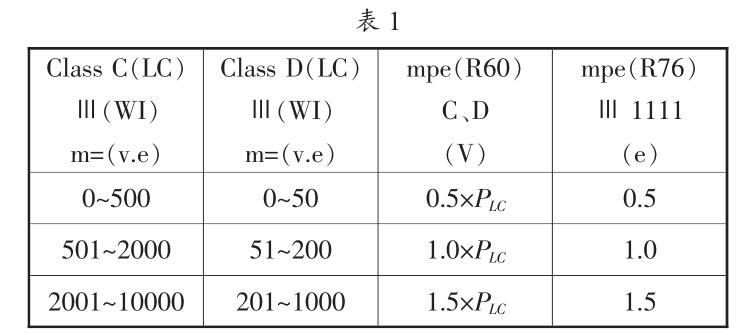
非自动秤的梯形误差包络限是由下述试验确定:
非线性+滞后+静态温度试验 注意此误差不包括蠕变和零点温度的影响。 传感器的误差限基本上也是根据衡器的试验程序 确定。从原则上讲,根据这样对应关系,用C3级 传感器来设计三级秤可供贸易用秤是完全能 满足要求。给设计者带来很大方便。
由于技术进步以及微处理机在称重系统中的 运用,对传感器和衡器带来了以下四个方面的新 发展:
•平台秤用的单点称重传感器 •数字传感器 •多分度称重装置 •多范围量程称重装置。
所以在新的R60 (2000年版中增加了对数 字传感器的试验和两项非强制性的参数:相对DR 或Z和相对Vmn或Y。这两个参数虽然是非强制 性,但对我们设计衡器却非常重要。
因此,要求传感器需给出以下参数的补充认 证检定证书:
•传感器的最大秤量.Ema (kg •最大检定分度数.ni£Max
•最小检定分度值:Vmi„ (kg 根据OIML R60得到的Cmdkh值是以V为单 位,需根据下式计算得出DR值。
DR= (Cmsjcrx Em) /nMox •灵敏度: mv/v •输入电阻:Q •供电电压:V •防护等级 •电线长度
这些参数是设计衡器的基本参数,首先根据 衡器量程选择传感器的最大秤量。
传感器的检定分度数:ni£=E_/V 衡器的检定分度数:n=Mx/e 传感器额定量程:丑腿、Em,„
衡器的秤量范围:Mx, Min=20e 传感器检定分度值:V、V™
衡器检定分度值:e、e™
通常使用的衡器要求满足贸易n要求,即三 级秤的要求。为此应选用C3级传感器。对于C3 级传感器,当分度n=3000时,最大允许误差为衡 器最大允许误差的Plc倍,其中mpe为衡器的最大 允许误差,Plc为分量系数,通常p«=0.7。
必须记住对于C3级传感器的3000分度,并 不是它的最大不能超过的误差限的分度数。它的 最大分度数如咖^ 3000,由DR或Z值确定, Z=E_/ (2DR 和 Z Mxifa/e—对 C3 级传感器。nMra 值一般为3000至10000。由它决定了传感器的测 量结果不超过最大允许误差(m^的测量范围,可 分成的最大分度数nM«„。同时也确定了用它制造的 衡器的最小分度值e„„。
传感器的最小检定分度V™或Y也是设计衡 器的重要参数。V™为温度每变化5°C传感器零点 的漂移值,HJNmn。它决定了在传感器不超过 最大允许误差使用范围内的最大分度数。通常Y 值比Z值大两至三倍。应注意Y与nc无关,下面 是根据OIML R60文本中所举例来了解Y和Z的 具体数值。
Class C3、nLc=3000、Y=12000、Z=4000 E_=100Kg、300Kg、500Kg、5000Kg、10t、 30t 和 50tClass C6 : nL=6000、Y=18000、Z=6000 Emat=50Kg、100Kg、300Kg 和 500Kg 下面我们用实例来说明如何根据这些参数来 设计衡器。
根据欧洲EN45502、4, 2, 1,传感器的E- 和衡器的Max^,之间应满足下要求:
E—乏(MaxMjj+DL+IZSR+NUD+T) /N 式中:N—传感器的数目;
DL 死载荷;
IZSR——初始的零点的设置范围:
NUD 载荷非均匀分布,即角偏误差;
T——附加皮重。
并推荐对传感器容量的快速估计法。
Mxm„/N. E腿=0.25 …0.5
相对Vmn或Y和相对DR或Z是设计衡器非常 重要的两个参数。特别是设计多量程和多分度衡 器的根据。由此二参数决定所选的传感器是否满 足多量程衡器和多分度衡器的要求。
•多量程衡器MR
双量程 三量程:
DR=0.5e,由 至 0 (DRS e)
V,^„=1.0ell 由 开始至 0
Y=E—/V腿或
^min— emiJ 姨^
ZS 0.4MaxMat/emin (当 DR 未知时 双量程衡器:高Y值 三量程衡器:高Y值和高Z值 •多分度衡器MI 双分度一三分度:
DR=0.5e1 由 Maxi 至 0 ZEmJ (2DR ZS MaxM„/e„»
双分度衡器:高Y值和高Z值 三分度衡器:高Y值和特高Z值 再重复一下,Y和Z值与niC和阶梯误差限无 关。下面举实例在设计多量程和多分度衡器时, 如何确定Z和Y值。
•用100Kg单点式传感器,设计一台三量程
秤。
每一量程分度精度均为n=3000,即: n=Max/e=60Kg/20Kg=3000 Y=EmII/Vmin=100Kg/0.005Kg=20000 和 Z=0.4 • MaxMa*/em,n=0.4 • 60Kg/0.005Kg=4800 可选Y=25000, Z=6000的传感器。在供电电 压为5V传感器的灵敏度为2mv/V时,e„„的输出 电压为:
emin=2mv/V* 5V* 0.005Kg/100K^0.0005mv=0.5^ V 据此可选适用于显示器,现在一般显示器均 可达 0.4^ V/VSL。
•用四只3000Kg传感器设计最大秤量 Max=3000Kg的双分度地秤。在国外认为地秤的载 荷非均匀分布值(NUI)很高。在本例中 NUD=1500Kg。以保护传感器在称重过程中不被破 坏。
要求:3000Kg/1Kg 和 500Kg/0.5Kg,静载荷 1500Kg;初始零点范围 500Kg 和 NUD=1500Kg。 每一量程分度精度均为n=3000,即: n=3000Kg/1Kg=3000
YS Em* VN/em„=3000Kg.2/0.5Kg=12000 ZS MaxMax/emin=3000Kg/0.5K^6000 可选用Y=23000和Z=6000的传感器。用上例 方法确定e™的输出电压,选择显示器。
中国也有多量程式多分度的衡器,若不能根 据传感器的Z和Y来选择合适的相应的传感器, 是不能制造出合格的多量程和多分度衡器。国外 大称量秤为多量程衡器,小称量,特别是商用秤 多为多分度衡器。
中国制造称重传感器的厂家,不太了解衡器 的设计和制造、使用。对于Z和Y两个参数,对 衡器的设计和制造的重要性不是很重视。衡器制 造厂家,也几乎认为只要传感器达C3级就可以用 来设计出优良的丨丨丨级秤,实际上同为C3级的传感 器,Z和Y可有很大的差异,不少C3级传感器是 达不到设计多量程和多分度秤的要求。
国内不少生产汽车衡的厂家,根据用户的要 求、生产出4000分度的汽车衡。下面通过分析看 看是否有理论依据。
用四只C3级100t传感器设计一台200t,n=4000分度的汽车衡:
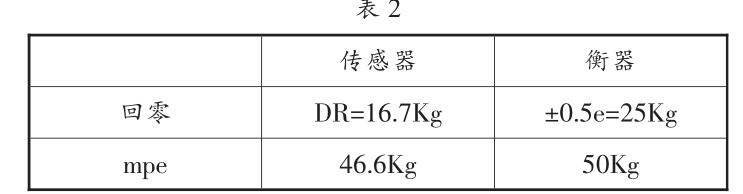
传感器 E_=100t, nic=3000, Z=3000 求传感器静载荷输出恢复DR和分度值e 2-DR=姨4 -100t/3000=2-33.3Kg=66.6Kg e=100t/3000=33.3Kg 最大允许误差
mpe=姨4 -e=2x 33.3Kg-PiC Plc=0.7 所以传感器的最大允许误差mpe=46.6Kg 根据OIMLR60,上面求的静载荷输出恢复DR 为在加载接近E丽时的恢复值。而衡器的零点恢复 值是在最大秤量值D (Max测得。通常用MDLOR表 示传感器在载荷E丽下测得的静载荷输出恢复值, 它与衡器载荷为D (Max测得的传感器DR值之间 存在以下关系。
DR=MDLOR * D (Max /E 腿 在此时DR=33.3Kgx 200t/400t (在均匀加载结 论)=16.7Kg
200t衡器,当分度数为n=4000时,分度值e
为:
e=4000 =50Kg,即 mpe=e=50Kg。
根据OIML R76,非自动衡器回零的偏差不得 超过± 0.5e,在此时为± 25Kg 将计算结果做比较。
如表2所示。
对D3级传感器,Y2 10000是最起码的要求。 再估计显示器的要求,通常显示器桥压为5V,最 小一位示值0.4pV/e。针对现选定的传感器,灵敏 度为 20mv/V, E_=100t。
^ V/e=20mv/Vx 5V 50Kg/(100tx 4) =500mv/400t=1.25p V/e>0.4^V/e 从上述理论分析,可得出结论:用C3级传感 器,可以制作n=4000分度的III级秤。但是对汽车衡之类的户外用衡器,由于风力等环境条 件的影响,即使是n=3000分度的衡器,要确保测 量精度也有一定问题,所以n=4000分度在户外使 用的衡器欲保证测量精度就更有困难。
中国制定传感器检定规程和标准的专家对衡 器不甚了解,反之对制定衡器检定规程和标准的 专家对传感器也同样不甚了解,特别表现在制定 衡器的标准时,对应使用传感器的具体的计量要 求和技术要求没有明确的规定。这表现了中国的 衡器工作者在衡器基础知识和理论方面的缺失, 这是中国欲成为衡器强国需要努力的重要方面。
至今,还没有任何一种测力传感器能动摇应 变传感器在称重领域的地位。然而应变传感器应 如何发展始终是研究的问题。也曾有不少厂家试 图将“应变片”直接溅射到弹性体上。但至今未 见到正式批量的产品。我们也曾在这方面做过研 究,发现不仅弹性体要专门设计,而且溅射后的 “应变计”与原来的箔材的物理特性也有改变。原 来的箔材是合金体,而现在由于是溅射变成“分 层”的。总的来说,近几十年来,应变传感器本 质上没有太大改变。其改进主要表现在工艺方面 和设计了能适用各种测量需要的弹性体。制定了 与衡器计量要求、技术要求的标准和试验方法。 以便于简化对衡器的设计。值得一提的是组件式 传感器的出现,可简化和便于衡器的设计和安装、 调试。这也是传感器的_个明显进步,但传感器 的进步始终是衡器发展的前提,因此说“称重传 感器是称重系统的心脏”.
