
基于不同车速对动态地磅测量结果影响的分析
采用动态地磅检定规程中数学模型,分析不同车速对动态地磅计重的影响,同时给出 通过该动态地磅合理的车速。
动态称重与静态称重相比节省时间、不易造成 交通干扰等优点被广泛的应用在公路上,促进现代 化交通运输管理起着巨大的作用。动态地磅为动 态称重中重要的一种衡器,在实际应用中车速变化 对动态地磅示值较大的影响。虽然调整仪表参数 在一定程度减小车速对动态地磅示值的影响,在 实际应用中仍旧存在着很大的差异。为了减少动态地磅重量引起的争议,寻找合理车速减小动态汽 车衡称量结果差异显的尤为重要。笔者按照规程 JJG907 — 2003《动态汽车衡检定规程》中规定的方 法和要求,采用Ml等级的砝码确定参考车辆的质 量。结合规程JJG907 — 2003《动态汽车衡检定规 程》和收费站要求,车速选取为2、3、4、5、6、7、8、9和 I0km/h对动态地磅的最大偏差进行分析,并绘 制相应的曲线,对其曲线进行分析。
1.试验方法
使用静态地磅SCS—100型(Max=100t 和d=2okg)符合〇m级,采用“闪变点”法或内分辨 率法确定参考车辆(参考车辆为四轴车)的质量,参 考车辆质量为39000kg。
应用参考车辆测定动态汽车衡的动态示值误 差,实验动态汽车衡(DCS — 30K H )最大称量及分 度值分别为Max = 30t和d = 20kg,采用车速为2、 3、4、5、6、7、8、9和I0km/h记录动态衡器的示值 (速度误差不超过5%),每个速度下测量10次,并 绘制示值图。各个车速点再进行5组实验(10次为 1组),并绘制车速与最大允许误差图。
并且对测量 示值最大误差进行数据分析。
2.实验模型
依据JJG907 — 2006要求和数学分析,对动态试验应用如下模型:
单轴载荷的偏差:DevAxie ^ Axle; — CorrAxle^
轴组载荷的偏差:DevCn)up = Group;— CorrGroupi
车辆总重量误差:ETMV = TMV—TMVref 式中DEVAxie是指单轴载荷偏差;Axlei每次记录 单轴的载荷;CorrGroupi单轴载荷的修正平均值; DevCroup指轴组载荷偏差;Group;指每次记录轴组的载 荷;^^^指轴组载荷修正平均值;ETMV指车辆总 重量误差;TMV指衡器显示的车辆总重量;TMV^指 整车静态称量确定参考车辆总重量约定真值。
3.测量结果
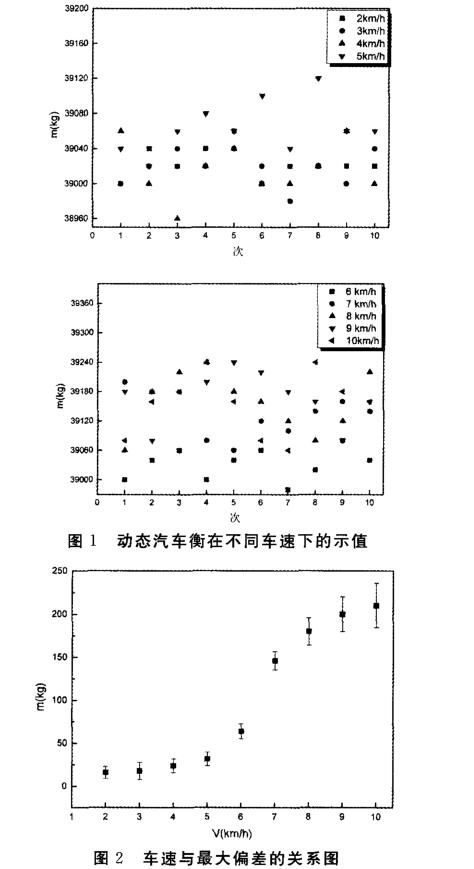
基于动态地磅用不同速度多次测量值,如图 1所示,其横坐标为测量的次数(10次测量为1组数 据),纵坐标为每次测量的重量示值,测量速度为2、3、4、5、6、7、 8、9和10km/h。在图中我们发现不同速度测量下, 衡器的示值离散变化程度不同,当速度越快其离散 程度也随之增加。
图2横坐标为通过车衡车速,纵坐标为最大偏 差值,误差棒指的是6组(每组10次)测量后最大偏 差的范围。从图2中我们可以看出,当车速为2、3、 4和5km/h时,汽车衡的最大偏差相差不大。当车 速大于5km/h小于等于10km/h时,汽车衡测量偏 差较大。从图中比较可以得到,当汽车车速小于 6km/h时通过该汽车动态衡的最大偏差相对较小。
4.结束语
本文对不同车速对动态地磅进行了试验分 析,得出车速小于6km/h时,称量结果与约定真值 差距较小。
